
Останні два десятиліття кубсати стають все більш доступні, а тому і більш поширені. Деякі з них мають оптичну камеру. На малюнку в шапці є зображення майже завершеного single piece space telescope, що мене надихнув на цей допис.
Тут я хотів би подумати над застосуванням, проектуванням і обмеженнями камери для "фотографування Землі з космосу". Я не планую якого практичного застосування цих результатів, а тому варто сприймайти все тут написане лише як певну вправу.
1. Вступ
Земля з космосу є чаруюче красивою навіть на фотоздимках. Але що можна видивитись на цих фотографіях? Все залежить від розширення.
Максимальне розширення камери визначається дифракційним лімітом (в ідеалі) і фокусною відстанню. Ілюстративно проблема розширення зображена на малюнку знизу:
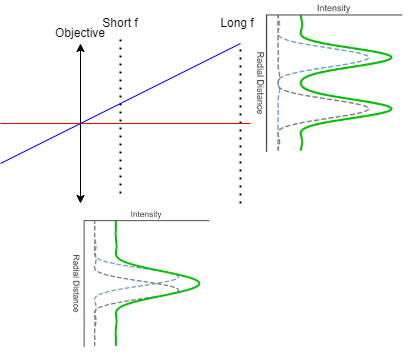
Дифракційний ліміт це діаметер ідеального точкового джерела і він залежить від дифракційного числа і довжини хвилі:

Але на практиці дифракційний ліміт важко досягти і максимальне розширення лімітоване або абераціями (відхилення від ідеального сферичного хвильового фронту) або розміром пікселя камери. Чим більша кількість лінз і видів скла, тим більша свобода для оптичного інженера аби скоректувати аберації. Тому гарні об'єктиви є великі.
І для великого професійного фотооб'єктива і для камери телефону можна отримати однакове дифракційне число, але якщо першим можна видивитись деталі на кількасотметровій віддалі, то камерою телефона ні. Для фотографування об'єктів на великій відстані потрібна довга фокусна відстань. Фокус камери  залежить від бажаної роздільної здатності:
залежить від бажаної роздільної здатності:

де pixel це розмір пікселя камери (від кількох µm до кількадесят µm), GSD це бажана вибірка на земній поверхні (Ground sampling distance). Грубо кажучи це роздільна здатність на землі. А ALT це висота супутника над землею.
Зазвичай чим більша фокусна відстань, тим більший об'єктив, тому є обмеження на те, що можна вмістити на кубсат. І все таки, хоча обмеження є досить суворі, але не ватро думати, що маленький об’єктив буде вкрай погано працювати. Бо все залежить від того, що ми хочемо побачити.
2. Технічне завдання
Ок, тоді що ми хочемо видивитись? Ворожі танки чи рух хмар? В цих крайніх випадках роздільна здатність різниться від кількадесят сантиметрів до кількох кілометрів. Ось малюнок-схема, що дає певні ідеї:
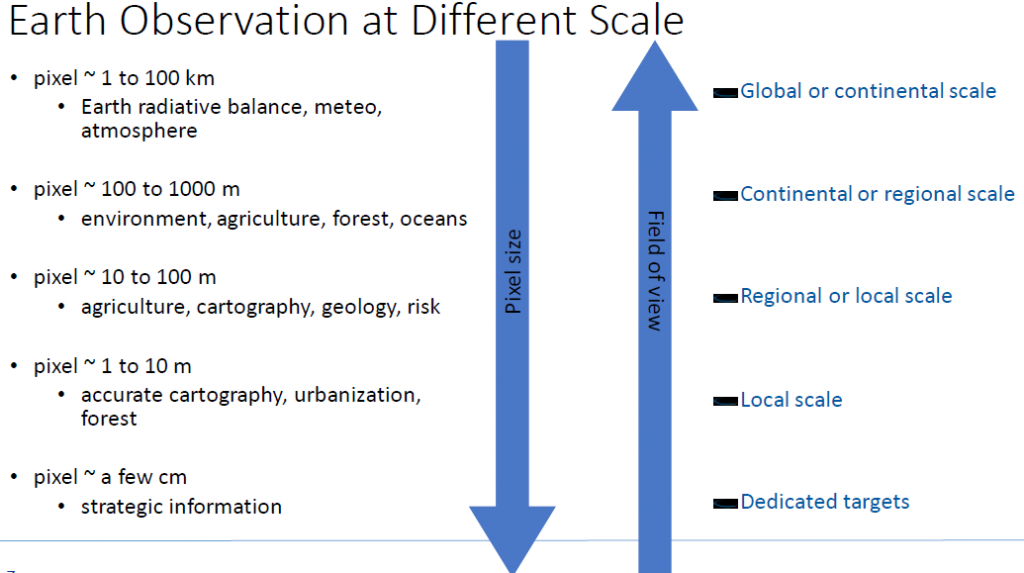
Я вважаю, що роздільна здатність у 10м-100м може бути цікавою з широким спектром застосувань. Чому б, наприклад, не зробити агросупутник для України?
Найпростіший спосіб скласти тех завдання, це скопіювати його з чогось схожого і робочого. Персонально мені видається, що старенькі SPOT супутники є ідеальні кандидати для цієї вправи. SPOT сімейство супутників – це французькі мультиспектральні супутники для картографування землі. Це «діди» сентінелів. Тому грубо кажучи технічне завдання є вмістити імажер SPOT4 супутника в кубсат.
Ось, наприклад, мапа моніторингу збору врожаю з цим супутником:
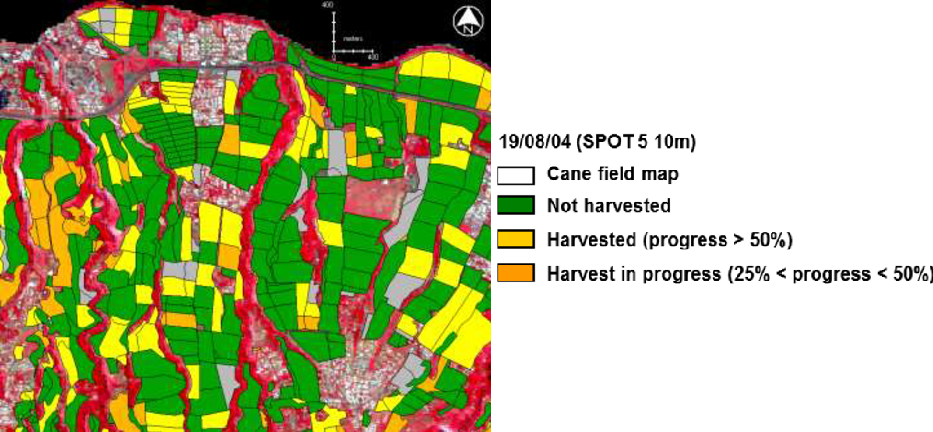
STOP супутник є мультиспектральним (gree, red, NIR, SWIR1), але я не хочу перемудрити з детекторами і фільтрами. Це лише теоретична вправа, тому звичайна камера з RGB фільтрами у видимому діапазоні згодиться. SWIR і далі детектори продаються з великими пересторогами, потребують зазвичай охолодження для нормального SNR та відносно великі у розмірі.
Варто перестерегти, що посилати в космос фільтри, що не є space qualified, це дурна ідея. Існує велика ймовірність що вони втратять прозорість і камера осліпне. Комбінація "монохромна камера + якісний фільтр" є якісно краще ніж Bayer array на детекторі.
3. Орбіта
Сонячно синхронна орбіта – ідеальна для імажерів як наш. Ось чому (витяжка з вікі):
Сонячно-синхронна — геоцентрична орбіта, на якій супутник проходить над будь-якою точкою земної поверхні приблизно в один і той же місцевий сонячний час. Таким чином, кут освітлення земної поверхні буде приблизно однаковим на всіх проходах супутника. Такі постійні умови освітлення дуже добре підходять для супутників, що одержують зображення земної поверхні (зокрема, супутників дистанційного зондування землі, метеосупутників).
Вікіпедія
Най висота обріти буде 800 км. Швидкість супутника буде

де M та R є масою та радіусом Землі відповідно. G є гравітаційна стала. Орбітальний період супутника є

Проекція швидкості супутника на замлю:

Саме з цією швидкість камера сканує землю.
4. Детектор
Як вибрати сенсор? Ну поперше він має бути space qualified. Для нашої вправи це не обов’язково, але щоб мімікрувати під справжність, при виборі детектора на digikey температурний діапазон має бути не менще -40 +80 deg.
Я досить рандомно я вибрав ось цей:
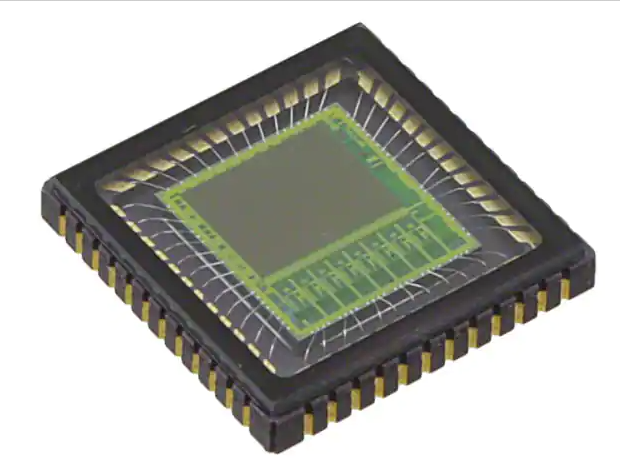
Він має не ідеальні параметри, але ідейно підходить. Знову ж таки, це лише вправа.
Основні параметри детектора наведені нижце (дані з даташиту).
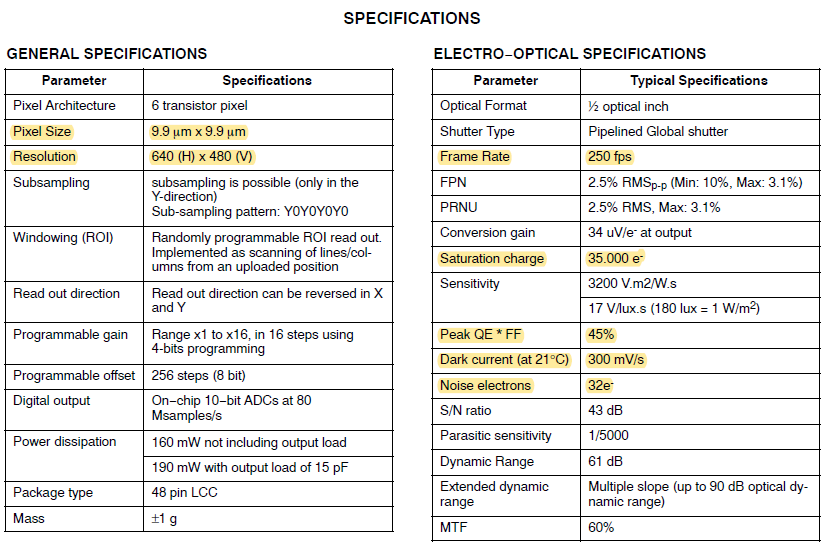
Він має розширення 640х480, що вже майже зникло зі вжитку, але кубсату буде важко (IMHO) обробляти більші зображення. Тим паче він досить вдало підходить по інших параметрах і його легко купити (хоч модель і застаріла).
5. Об’єктив-телескоп
Насправді, для оптичного телескопу у мене вже є ідея. Це класичний телескоп Кассергена виготовлений з суцільного шматка скла. Вирівнювання дзеркал робиться ще при виготовленні. Єдиний ступінь свободи це лише фокусування, що є прекрасно. Особисто я вважаю цю ідею геніальною. Більше про цей телескоп можна дізнатись на цьому каналі. В США цей телескоп наче захищений патентом.
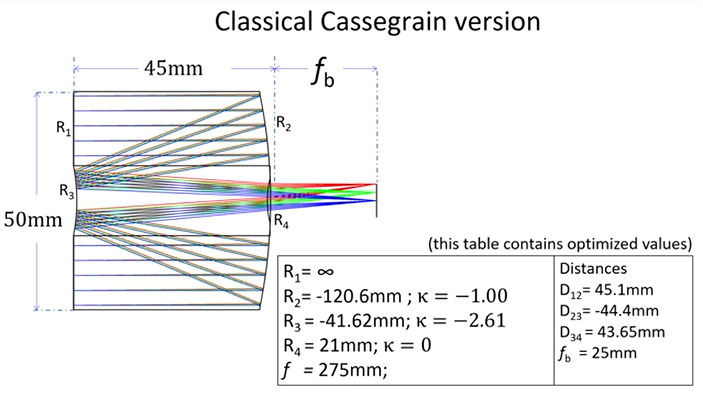
Загальна довжина телескопа 70 мм, а отже він вміщається в 1U. Напевно потрібен буде ще як мінімум один юніт для електроніки. Оціночна маса телескопу 220 грам.
У реальному житті ми мали б спроектувати оптику по затребуваним параметрам (фокальна відстань, дифракційне число, поле зору і тд). Але я хотів би трохи перевернути конструкційну логіку і придумати задачу під цей телескоп.
Отже, ground sampling distance (GSD) для телескопа з даною фокальною відстанню ( ) і пікселем розміром 9.9µm на висоті супутника ALT=800 km буде:
) і пікселем розміром 9.9µm на висоті супутника ALT=800 km буде:

Це годиться для на нашої початкової мети.
Наступне питання, це наскільки велике наше поле зору. Якщо зорієнтувати довшу сторону детектора (640 pix) впоперек руху супутника, то swath буде:

Не густо, але не біда.
Варто ще перевірити, чи влізає наш детектор у поле зору телескопу, бо воно маленьке. Отже,
Пів поля зору буде:

Детектор, як вписаний підходить під цей телескоп.
5.1 Слово про оптичні характеристики телескопу
Цей телескоп є досить компактним. Його розміри майже в чотири рази менші від фокальної довжини. Але як і кожен Кассерген він страждає від коми, тому поле обзору мале.
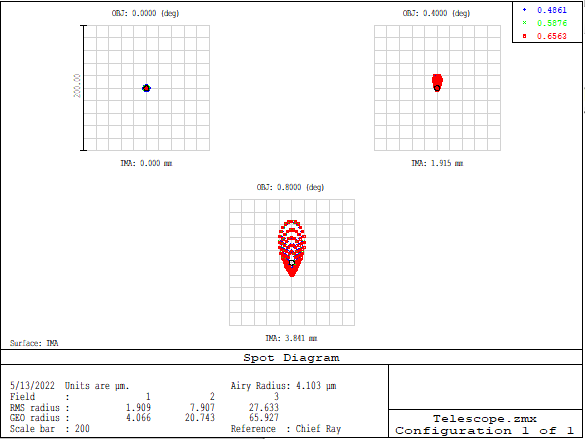
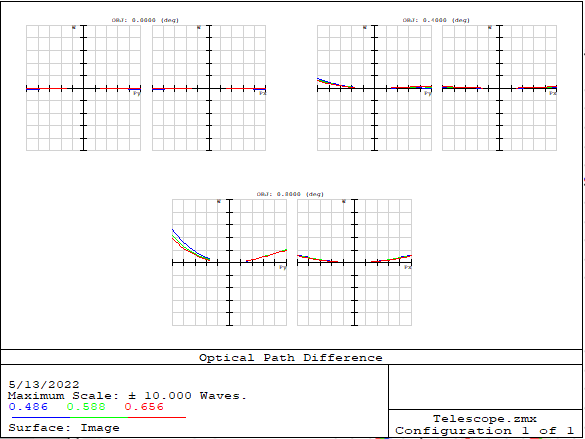
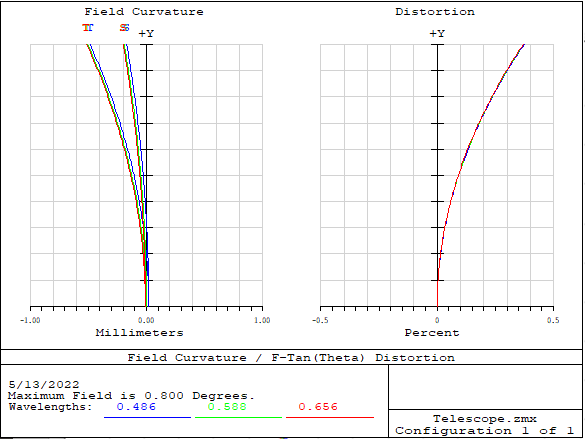
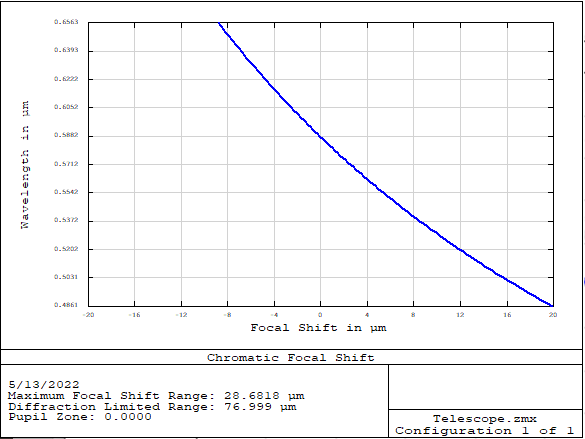
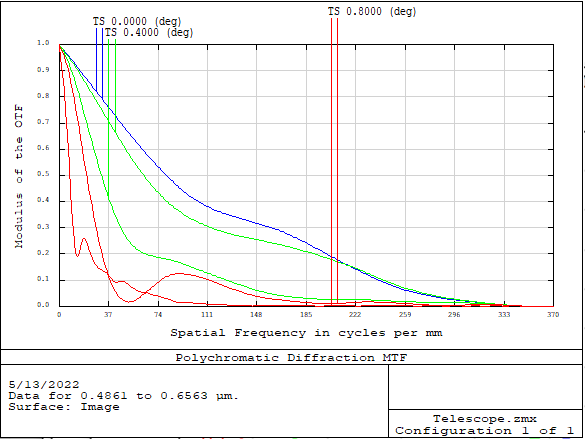
Також телескоп має Field curvature (пучки від різних полів фокусуються на кривій, а не в площині детектора). Незважаючи на те, що телескоп виготовлений в одного куска (одно матеріалу), хроматичні аберації досить малі. Через кому якість зображення деградує на периферії поля зору.
Якщо бажаєте погратись з оптичною моделлю, то ось мій файл:
6. Примітивні радіометричні обрахунки
Одна з головних речей для перевірки є відношення сигнал/шум (Signal to noise ratio -- SNR).
Спершу варто оцінити кількість електронів, що прибувають на єдин піксель:

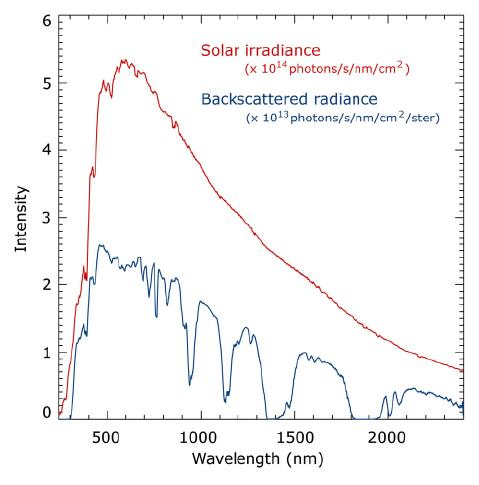
 це радіанс («яскравість» ) землі. Вона залежить від довжини хвилі, але у видимому діапазоні це буде близько
це радіанс («яскравість» ) землі. Вона залежить від довжини хвилі, але у видимому діапазоні це буде близько 
 – це ширина смуги пропускання фільтра (і оптики загалом). В нашому випадку фільтр іде разом з детектором. В даташиті на наш детектор я не знайшов характеристики фільтра, але знайшов у схожої моделі:
– це ширина смуги пропускання фільтра (і оптики загалом). В нашому випадку фільтр іде разом з детектором. В даташиті на наш детектор я не знайшов характеристики фільтра, але знайшов у схожої моделі:
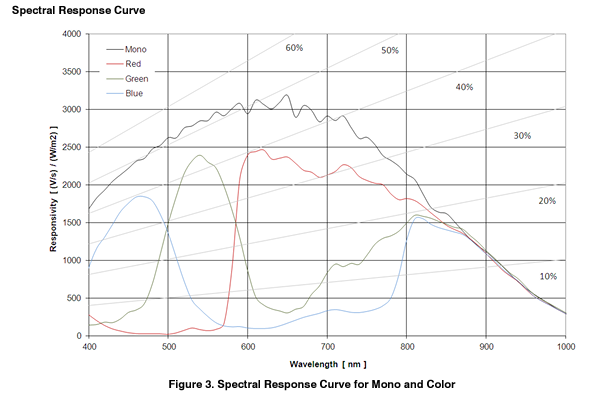
З цього я можу оцінити, що приблизна ширина фільтра для синього і зеленого є приблизно 100 nm.
Проходження (transmission) оптичного приладу T є приблизно 0.8-0.9. У цій вправі, я взяв T=0.3, бо маю сатурацію детектора (далі буде). Це означає, що оптична система потенційно може потребувати частоко відбиваюче покриття на першій поверхні телескопу (там пучок паралельний і так буде менше паразитного світла).
Максимальна квантова ефективність детектора є 45% (з його даташиту).
E у вищезазначені формулі є етендю (throughput). Це добуток тілесного кута в який приймається світло на площу на якій воно приймається:

Для даної оптичної системи оціночно  (насправді 5.72), а етендю
(насправді 5.72), а етендю  .
.
Час інтегрування  (якщо нема часового бінінгу).
(якщо нема часового бінінгу).
Тут варто зазначити, що frame rate (частота отримання зображень) є  і є менше максимальної частоти на якій може працювати детектор (250 Hz). Це не завжди так і це варто перевіряти при виборі детектора, аби він задовільняв вимоги, бо більшість детекторів мають максимальну частоту зображень 60 Hz.
і є менше максимальної частоти на якій може працювати детектор (250 Hz). Це не завжди так і це варто перевіряти при виборі детектора, аби він задовільняв вимоги, бо більшість детекторів мають максимальну частоту зображень 60 Hz.
В результаті ми отримуємо  . Це близько до сатурації. Наш детектор може отримувати максимум 35000 електронів. Саме тому я зменшив transmission приладу.
. Це близько до сатурації. Наш детектор може отримувати максимум 35000 електронів. Саме тому я зменшив transmission приладу.
На практиці є два значення радіансу: базове (з яким зазвичай працюють) і максимальне, яке необхідне для перевірки на сатурацію (як от ми це зробили).
Наступний крок – підрахунок SNR :

Де DC – це темний струм (darc current). Він присутній в детекторі через тепловий рух електронів. З даташиту я оцінюю цей струм як: 300 mV/s /34 µV/e=8820 e/s.
Шум електроніки RO (Read out noise) є 32 e. Тоді SNR=178, що є дуже пристойно.
Я створив ексель таблицю для цих підрахунків:
7. Різне
Ширина сканування (swath) є менше 20 km, що не робить його дуже практичним. Якщо вважати, що супутник щоразу скануватиме нову ділянку, то потрідно буде 305 днів аби відсканувати всю землю. Хотілося б отримувати нові фото щотижня хоча б (а то і кілька разів на тиждень), аби бути корисним в агробізнесі хоча б. Плюс до того 67% поверхні землі постійно закриті хмарами, тож не щоразу можна буде отримувати фото.
Було б непогано направляти супутник (а ля Хаблівські реакційні колеса і магнето-торкери). Отже, потрібна система направлення. Хоча вона потрібна в будь якому разі для стабілізації. А от збільшити покриття поверхні можна буде збільшивши кількість супутників.
Окрім того, дані потрібно передати на землю. У повному форматі при 10 бітному AЦП, це 706 Mb/s, що не слабо для кубсату. Плюс ці дані потрібно буде отримувати, а значить треба наземні станції. Проте якщо згадати, що те саме зображення поверхні ми отримуємо 480 разів, ми можемо просто просумувати всі зображення (для тої самої точки поверхні) і збільшити SNR у  разів чисто статистично, а трафік скоротиться у 480 разів. Окрім цього, якщо викидати зображення з хмарами, то трафік зменшиться ще на 67%.
разів чисто статистично, а трафік скоротиться у 480 разів. Окрім цього, якщо викидати зображення з хмарами, то трафік зменшиться ще на 67%.
Але і без останнього, низхідний потік буде 1,47 Mb/s, що мені вважається досяжним. Отже, кубсат потребує певної обробки зображень на борту.
8. Висновки і перспективи
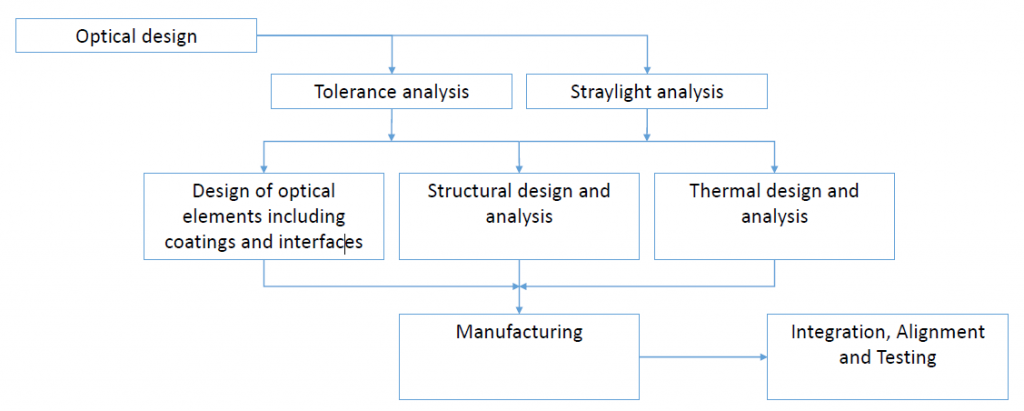
Отже, ми “позичили” оптичний дизайн і переконались що він підходить. У випадку якщо такого нема, то оптику можна просто маштабувати зберігаючи дифракційне число. При маштабуванні виникають проблеми через потенційно збільшене поле зору, але простіше оптимізувати дизайн маючи робочий розв’язок аніж проектувати з нуля.
Наступними після оптичного дизайну іде аналіз розсіяного світла (моя спеціалізація) і аналіз допусків. Толеранс я робити не буду, бо це буде головна біль виробника телескопу, а не моя (в цьому і фішка телескопу), а аналіз блукаючого світла я зроблю окремо.
Отже, ми придумали задачу під імажер на кубсат, знайшли і перевірили телескоп, підігнали детектор і зробили нульовий радіометричний аналіз. Окрім цього, ми визначили необхідні системи (націлювання і обробки зображень) аби цей імажер мав практичний сенс.
Головним лімітом більшого розширення є швидкість детектора. Вибравши швидший детектор можна значно збільшити розширення за рахунок меншого пікселя, бо запасу по SNR хватає.
P.S.
Після того, як я це все написав, то виявив що існує ціле сузір’я таких от супутників від Planet Labs. (https://www.planet.com) Це супутники сімейства Flock. Вона мають 29Мпікселів камеру (для останньої платформи) і 3.7м GSD. Це чудо вмістилось в 3U і є досить успішним проектом.
Окрім того вони є новаторами в високошвидкісній передачі данних. Судячи по спектральним смугам вони використовують звичайний кремнієвий детектор.